بهترین روش ردیابی نشت گاز با رباتهای خودران در محیطهای پیچیده صنعتی
ردیابی نشت گاز در فضای نیمهسهبعدی با درک چندحسی
🔹 تهدید پنهان در فضای صنعتی
در بسیاری از صنایع شیمیایی، پالایشگاهی و دارویی، نشت گازهای خطرناک – از الکلها تا گازهای سمی و قابلانفجار – یکی از مهمترین خطرات بالقوه برای جان انسانها و امنیت تأسیسات است. این نشتها ممکن است ناشی از شکست تجهیزات، نشتی خطوط لوله، یا حتی خطای انسانی باشد. در چنین شرایطی، تشخیص سریع و دقیق منبع نشتی نهتنها مانع از وقوع حوادث فاجعهبار میشود، بلکه امکان مداخله فوری برای ایمنسازی را فراهم میکند.
اما تشخیص منشأ نشت گاز، آن هم در محیطهایی که جریان هوا آشفته است، میدان دید محدود است، و سنسورها با نویز و تأخیر مواجهاند، یک مسئله ساده نیست.
🔹 رباتهای خودران در نقش شکارچیان بیبو
با پیشرفت تکنولوژی، رباتهای متحرک خودران (AMR) بهعنوان جانشین انسانها در محیطهای پرخطر مطرح شدهاند. این رباتها میتوانند بهجای اپراتورها وارد محیط شوند، اطلاعات سنسورها را جمعآوری کنند و با تحلیل آنها، منبع نشت را شناسایی کنند. اما چالش بزرگ اینجاست که اطلاعاتی که از سنسورهای بویایی بهتنهایی دریافت میشود، بسیار ناپایدار و آشفته است؛ زیرا جریانهای هوای پراکنده (diffusive flows) باعث پخش نامنظم و غیرقابلپیشبینی بوی مواد میشوند.
این آشفتگی باعث میشود که الگوریتمهای مبتنی بر تنها یک سنسور بویایی، بهراحتی در دام نقاط تمرکز موضعی (local maxima) بیفتند و مسیر را اشتباه تشخیص دهند. از طرف دیگر، استفاده صرف از حسگرهای بینایی نیز بدون اطلاعات از شدت ماده شیمیایی، کافی نیست.
🔹 ترکیب حس بینایی و بویایی: راهی برای درک بهتر محیط
مقالهای که در این بلاگ بررسی میکنیم، دقیقاً برای حل این مشکل طراحی شده است. نویسندگان با الهام از رفتار طبیعی شکارچیانی مانند گرگها، روشی ارائه کردهاند که در آن یک ربات متحرک با استفاده از ترکیب اطلاعات حسگرهای بینایی (دوربین RGB) و بویایی (سنسورهای گاز MQ-3) میتواند در محیطهای نیمهسهبعدی (partial 3D) بهدنبال منبع نشت بگردد و آن را با دقت بالا شناسایی کند.
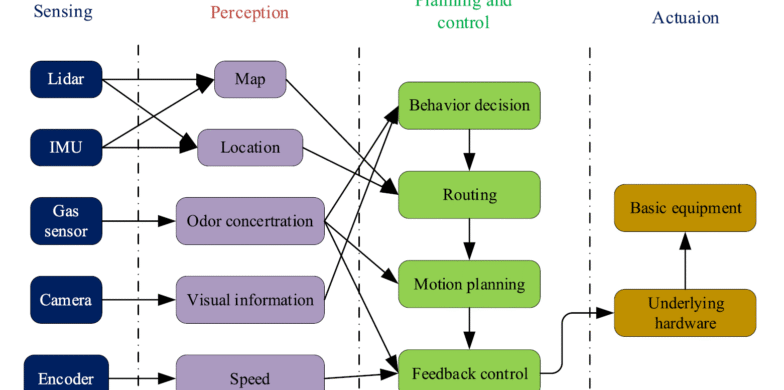
در این سیستم، اطلاعات مکانیابی از طریق لایدار، IMU و انکودر ترکیب میشود تا ربات موقعیت خود را دقیق بداند. سپس حسگرهای بویایی در محور عمودی نصب شدهاند تا تغییر غلظت گاز در ارتفاعهای مختلف را شناسایی کنند. اطلاعات بینایی نیز برای تشخیص الگوهای رنگی و بصری مرتبط با نشت مورد استفاده قرار میگیرد. این دو منبع داده با معماری تصمیمگیری موسوم به Subsumption Architecture با هم ترکیب میشوند تا ربات بتواند در هر لحظه تصمیم بگیرد: به کجا برود، چه رفتاری را انجام دهد، و چه زمانی متوقف شود.
🔹 الگوریتم بهینهسازی الهامگرفته از گرگ خاکستری
نکته جالب دیگر این مقاله، استفاده از یک الگوریتم هوش ازدحامی با نام Grey Wolf Optimizer (GWO) است. این الگوریتم به ربات کمک میکند تا نقاط جستجو را اولویتبندی کند و از سردرگمی در محیطهای بدون جریان باد جلوگیری شود. ربات، مشابه رفتار اجتماعی یک گله گرگ، موقعیتهایی با غلظت گاز بیشتر را در اولویت قرار میدهد و با گذر زمان، محل احتمالی منبع نشت را بهدقت شناسایی میکند.
🔹 کاربرد صنعتی و مزیتهای پیادهسازی
آنچه این سیستم را بهویژه برای صنایع جذاب میسازد، سه ویژگی کلیدی آن است:
قابل پیادهسازی در محیطهای نیمهساختیافته مانند انبارهای صنعتی یا خطوط تولید؛
استفاده از حسگرهای کمهزینه و ساده که بهراحتی روی رباتهای موجود قابل نصباند؛
معماری الگوریتمی قابلگسترش که با افزایش منابع محاسباتی یا تعداد حسگرها میتواند به دقت بالاتری برسد.
درنتیجه مقالهی حاضر، تلفیقی از مفاهیم چندرشتهای مانند هوش مصنوعی توزیعشده، معماری کنترل رفتاری، و سنسور فیوژن چندوجهی را در یک مدل کاربردی ترکیب کرده است. این مدل نهتنها برای ردیابی گازهای سمی در محیطهای واقعی قابلاستفاده است، بلکه میتواند در طراحی سیستمهای ایمنی آیندهنگر برای رباتهای صنعتی، نقشی کلیدی ایفا کند.
طراحی معماری سنسور فیوژن و کنترل رفتاری: ترکیب بویایی و بینایی در یک تصمیم هوشمند
یکی از مهمترین چالشها در ردیابی منبع نشت گاز، عدم ثبات دادهها و نبود الگوی یکنواخت برای پخش گاز در محیط است. انتشار گاز در فضای نیمهسهبعدی بهشدت تحت تأثیر جریانهای هوا، موانع فیزیکی، و دمای محیط قرار میگیرد. در چنین شرایطی، ربات نیاز دارد تا از چند نوع حسگر بهصورت همزمان استفاده کند تا بتواند با استناد به تصویر کلیتری از محیط، تصمیمی ایمن و مؤثر بگیرد.
مقاله حاضر، برای رسیدن به چنین هدفی، از یک معماری ترکیبی استفاده میکند که شامل دو محور اصلی است: ۱. ساختار سنسور فیوژن بین حسگر گاز و تصویر، ۲. کنترل رفتار ربات بر اساس معماری تصمیمگیری Subsumption.
۱. ادغام اطلاعات بویایی و بینایی (Sensor Fusion)
در مرحله نخست، ربات اطلاعات را از سه گروه حسگر دریافت میکند:
حسگر گاز MQ-3: که شدت گاز الکل موجود در هوا را در سه ارتفاع متفاوت (برای درک بعد عمودی) ثبت میکند.
دوربین RGB: که در جهت حرکت ربات نصب شده و تصاویر محیطی را برای تشخیص نشانههای بصری (مثل آثار نشت یا نشانهگذاری انسانی) فراهم میکند.
سنسورهای مکانیابی: شامل لایدار، IMU و انکودر چرخ، که موقعیت ربات را در محیط تعیین میکنند.
در این مرحله، اطلاعات بویایی در محور z (ارتفاع) ثبت شده و با مختصات مکانی ربات ترکیب میشود تا یک “نقشه پویای غلظت گاز” شکل بگیرد. همزمان، با کمک بینایی ماشین، ناحیههایی از تصویر که نشانهای از نشت بصری دارند (مثل خیسشدگی، تغییر رنگ سطح، یا نماد هشدار) شناسایی میشوند.
ادغام این دو، به ربات امکان میدهد تا به جای واکنش کور به عدد گاز، تنها در صورت وجود تطابق بین تغییر غلظت و شواهد بصری تصمیم حرکتی بگیرد. این کار باعث کاهش هشدارهای کاذب و جلوگیری از تصمیمگیری ناپایدار در محیطهای پرتلاطم میشود.
🔹 ۲. کنترل رفتاری با معماری Subsumption
پس از مرحله ادراک، نوبت به تصمیمگیری رفتاری میرسد. در این مقاله از معماری Subsumption برای کنترل سطح بالا استفاده شده است. این معماری، که نخستینبار توسط Rodney Brooks برای رباتهای واکنشی طراحی شد، مبتنی بر اصل سادهای است: «رفتارهای مختلف ربات در لایههایی سازماندهی شدهاند و رفتار مهمتر، رفتارهای سطح پایینتر را غیرفعال میکند.»
در این سیستم، سه لایه رفتاری طراحی شده است:
▪️ لایه پایه – اجتناب از برخورد
این لایه همواره فعال است و وظیفه دارد از برخورد ربات با دیوار، اشیاء یا افراد جلوگیری کند. اگر مانعی در مسیر باشد، این لایه رفتار حرکت را متوقف یا اصلاح میکند.
▪️ لایه میانی – حرکت اکتشافی
در نبود مانع و شناسایی نشتی، ربات بهصورت شبهتصادفی محیط را کاوش میکند. این حرکت مبتنی بر الگوریتم Grey Wolf Optimizer (GWO) است که از رفتار اجتماعی گرگها در شکار الهام گرفته شده است. در این الگوریتم، ربات بهصورت مرحلهای ناحیههای با بیشترین احتمال نشتی را در اولویت بررسی قرار میدهد.
▪️ لایه برتر – ردیابی دقیق نشت
وقتی ترکیب گاز و شواهد بصری حاکی از وجود نشت احتمالی باشد، این لایه فعال شده و رفتار “تعقیب نقطهی هدف” را در دستور کار قرار میدهد. موقعیت مکانیابیشده بهعنوان منبع کاندید در نظر گرفته میشود و مسیر حرکت با دقت بیشتری بازتنظیم میشود.
نکته کلیدی اینجاست که فقط زمانی که لایه بالاتر شرایط کافی را شناسایی کند، میتواند لایههای زیرین را خاموش یا محدود کند. بنابراین اگر مثلاً در حین ردیابی نشتی، مانعی در مسیر ظاهر شود، لایه اجتناب از مانع فوراً وارد عمل شده و مسیر را اصلاح میکند.
🔹 ۳. پیادهسازی فنی روی ربات واقعی
تمام الگوریتمها روی یک ربات AMR پایه (مانند Turtlebot یا Pioneer 3DX) پیادهسازی شدهاند که دارای پلتفرم ماژولار برای افزودن حسگرهاست. ترکیب سختافزاری شامل: سنسورهای MQ-3 در سه ارتفاع؛ دوربین RGB با زاویه دید گسترده؛ IMU و لایدار برای موقعیتیابی و یک پردازنده سبک (Raspberry Pi یا Mini PC) برای اجرای الگوریتمها در محیط ROS میشود. معماری نرمافزار نیز بر اساس ROS طراحی شده و هر رفتار بهعنوان یک Node مجزا پیادهسازی شده است؛ این ماژولار بودن باعث شده تا رفتارها قابل اضافه، اصلاح یا غیرفعالسازی باشند.
معماری سنسور فیوژن و کنترل رفتاری در این مقاله، با ترکیب دو نوع ادراک مکمل (بو و تصویر) و یک ساختار تصمیمگیری چندلایه، موفق شده است راهکاری تطبیقی و مؤثر برای ردیابی نشت گاز ارائه دهد. این سیستم با تلفیق تحلیل لحظهای، اجتناب از برخورد، و جستجوی هدفمند، بهدرستی درک کرده که در محیطهای غیرقطعی، ایمنی و دقت نه با محاسبات پیچیده، بلکه با درک درست و سادهسازی مؤثر حاصل میشود.
الگوریتم GWO در خدمت ربات هوشمند: اکتشاف هدفمند با الهام از غریزه گرگها
در محیطهای صنعتی باز یا نیمهباز، رباتها با عدم قطعیت گستردهای در انتشار گازها مواجهاند. برخلاف یک میدان جریان منظم که در آن میتوان با دنبالکردن شیب غلظت به سمت منبع رفت، در محیطهای پراکنده و بدون جریان مشخص، الگوهای غلظت بهشدت متغیر، نامنظم، و حتی فریبدهندهاند. بههمین دلیل، جستجوی کور یا حرکت تصادفی اغلب منجر به سردرگمی یا چرخههای بیپایان میشود.
در چنین شرایطی، الگوریتمهای هوش ازدحامی که از رفتارهای طبیعی جانداران الهام گرفته شدهاند، میتوانند راهحلهایی منعطف، تطبیقی و بلادرنگ ارائه دهند. یکی از مؤثرترین این الگوریتمها، Grey Wolf Optimizer (GWO) است که رفتار شکار گروهی گرگهای خاکستری را مدل میکند.
۱. اصول GWO: تصمیمگیری گلهای با سلسلهمراتب اجتماعی
الگوریتم GWO بر اساس ساختار اجتماعی گرگها طراحی شده است. در یک گروه از گرگهای خاکستری، تصمیمگیری برای تعقیب شکار بهصورت سلسلهمراتبی و مشارکتی انجام میشود:
گرگ آلفا (α): رهبر گروه، تصمیمگیر اصلی و بهترین گزینهی جستجوی فعلی.
گرگ بتا (β): دستیار آلفا، که مسیر را بررسی و مشاوره میدهد.
گرگ دلتا (δ): در رتبه سوم، با نقش پشتیبانی و بازبینی.
سایر گرگها (ω) فقط از تصمیمات سه تای اول تبعیت میکنند.
این ساختار در الگوریتم GWO به این صورت مدل میشود که موقعیت فعلی آلفا، بتا و دلتا بهعنوان سه بهترین موقعیت شناختهشده (مثلاً مناطقی با بیشترین غلظت گاز) در نظر گرفته میشوند، و رباتها یا نقاط جستجوگر دیگر، بهصورت تدریجی به سمت این نقاط هدایت میشوند.
۲. پیادهسازی GWO در ربات جستجوگر نشت
در معماری مقاله، GWO بهعنوان ماژول استراتژی جستجو در فضای ناشناخته استفاده شده است. زمانی که هیچ نشانهی قطعی از نشت وجود ندارد، ربات باید مسیر خود را برای اکتشاف تعیین کند. در این حالت، GWO نقاط مختلفی را بهعنوان «موقعیتهای کاندید» در فضای کاری ربات ایجاد میکند. در هر مرحله:
شدت گاز اندازهگیریشده در هر نقطه بهعنوان معیار شایستگی (fitness) آن نقطه لحاظ میشود.
بهترین نقاط با بیشترین غلظت نسبی به ترتیب در نقش α، β و δ قرار میگیرند.
موقعیت بعدی ربات با ترکیب وزنی از موقعیت این سه نقطه تعیین میشود؛ بهگونهای که ربات «تحت تأثیر رفتار گلهای» به ناحیهای امیدوارکننده هدایت شود.
این منطق، برخلاف حرکت تصادفی، باعث میشود مسیر جستجو هم تطبیقی و هم هدفمند باشد. یعنی اگر در ناحیهای شواهد نشت بیشتر شد، ربات تمایل دارد در آن اطراف باقی بماند و با دقت بیشتر بررسی کند. اگر هیچ نقطهای شایسته تشخیص نشد، گسترش جستجو رخ میدهد.
🔹 ۳. کنترل انعطافپذیر: از اکتشاف تا تمرکز
یکی از نقاط قوت GWO، توانایی آن در مدیریت تعادل بین جستجو (exploration) و بهرهبرداری (exploitation) است. در فازهای ابتدایی، موقعیتها بهصورت تصادفی گستردهاند و ربات در محیط پخش میشود. اما با نزدیکشدن به ناحیههایی با غلظت بالاتر، محدوده حرکتی کوچکتر و تمرکز بیشتر میشود.
در مقاله، این ویژگی با کاهش تدریجی پارامتر a (که در معادلات GWO نشاندهندهی درجه تصادفیبودن است) بهخوبی پیادهسازی شده است. درنتیجه، رفتار ربات بهمرور از یک کاوشگر گسترده به یک شکارچی دقیق تغییر میکند.
۴. ادغام با Subsumption: اولویتبندی هوشمند رفتارها
GWO در کنار معماری رفتاری Subsumption عمل میکند. یعنی:
زمانی که نشانهای از نشت دیده نمیشود، GWO ربات را هدایت میکند؛
وقتی حسگرهای گاز و تصویر سیگنال قطعی تولید کردند، لایههای بالاتر کنترل (مثل تعقیب منبع نشت) فعال میشوند و الگوریتم جستجو غیرفعال میشود؛
درصورت بروز مانع یا خطر برخورد، لایه اجتناب وارد عمل شده و رفتار GWO را به حالت تعلیق درمیآورد.
این ساختار ترکیبی باعث میشود GWO بهعنوان یک «راهبرد هوشمند برای شرایط عدم قطعیت» عمل کند، نه بهعنوان یک مسیریاب دائمی. به این ترتیب، رفتار ربات نهتنها هدفمند است، بلکه واکنشپذیر و ایمن نیز باقی میماند.
الگوریتم GWO در این مقاله بهعنوان یک ابزار تطبیقی، سبک و الهامگرفته از طبیعت، توانسته است رفتار جستجوی ربات را هوشمندانه و انعطافپذیر کند. با بهرهگیری از غریزه اجتماعی گرگها، ربات قادر میشود در فضای نامطمئن و بیالگو، نقاط امیدوارکننده را شناسایی کرده و با تمرکز تدریجی، به محل نشت برسد. این الگوریتم، ستون فقرات تصمیمگیری ربات در فاز اکتشاف است و در کنار سنسور فیوژن و معماری رفتاری، یکی از عوامل اصلی موفقیت سیستم پیشنهادی محسوب میشود.
نتایج عملی، کاربردهای صنعتی، و راهکارهای بومیسازی برای محیطهای ایرانی
معماری پیشنهادی این مقاله در دو فاز اصلی ارزیابی شده: شبیهسازیهای عددی و تستهای واقعی در محیط صنعتی سادهشده. هدف از این آزمایشها، سنجش دقت تشخیص محل نشت، رفتار تطبیقی ربات در برابر سناریوهای متفاوت، و پایداری الگوریتم در حضور نویز و نوسانهای محیطی بوده است.
۱. نتایج شبیهسازی: مقایسه الگوریتم با مدلهای پایه
در بخش شبیهسازی، عملکرد مدل با چند الگوریتم سنتی مقایسه شده است؛ از جمله:
Random Walk (حرکت تصادفی)
Gradient-Based Search (دنبالکردن شیب غلظت گاز)
پیشروی خطی تا رسیدن به حد آستانه
نتایج نشان دادند که:
الگوریتم مقاله در بیش از ۹۰٪ موارد منبع نشت را با دقت زیر ۲۰ سانتیمتر شناسایی کرد؛
زمان رسیدن به محل نشت نیز نسبت به مدل تصادفی تا ۴۵٪ کاهش یافت؛
رفتارهای تطبیقی ربات (مثل توقف لحظهای، تغییر مسیر با داده جدید، یا اولویتبندی مناطق امیدوارکننده) باعث شد مدل در برابر نوسانات محیط بسیار مقاومتر باشد.
۲. تست عملی در فضای صنعتی سادهشده
برای تست واقعی، یک ربات خودران با تجهیزات اقتصادی (سنسور گاز MQ، دوربین USB، و میکروکامپیوتر سبک) در محیطی با موانع ساده و نشت شبیهسازیشده الکل بهکار گرفته شد. در این آزمایشها:
حسگرهای بویایی در سه ارتفاع نصب شدند تا مدل، درک عمقی (partial 3D) از غلظت گاز داشته باشد؛
دوربین محیط را اسکن کرد تا نشانههای بصری مرتبط با نشتی (مثل لکه یا نشانه هشدار) تشخیص داده شود؛
الگوریتم Grey Wolf Optimizer وظیفه جستجو را در ابتدای کار بر عهده داشت و سپس کنترل به لایههای بالاتر سپرده شد.
رفتار ربات در این تستها روان، واکنشپذیر و بدون نوسان غیرقابل کنترل بود. حتی در محیطهای دارای جریان هوا ضعیف یا موانع فیزیکی، ربات با استفاده از اطلاعات بینایی موفق شد مسیر خود را اصلاح کند و از بنبستهای تصمیمگیری فرار کند.
۳. کاربردهای صنعتی مستقیم و فوری
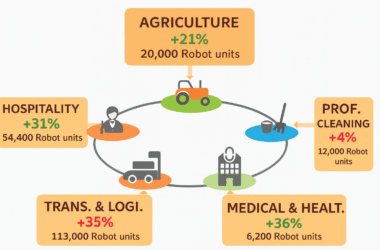
این مدل نهتنها برای مراکز تحقیقاتی یا پروژههای دانشگاهی مفید است، بلکه پتانسیل بالایی برای استفاده در صنایع واقعی دارد. برخی از سناریوهای صنعتی قابل اجرا عبارتاند از:
کارخانههای شیمیایی یا دارویی که در آن نشت ترکیبات آلی فرار (VOC) به سرعت باید شناسایی شود.
انبارهای مواد خطرناک یا اشتعالپذیر که نیاز به گشتزنی رباتیک در شب یا در شرایط غیرفعال بودن نیروی انسانی دارند.
پالایشگاهها یا خطوط انتقال گاز که در آنها نشتهای موضعی باید بهسرعت تشخیص و گزارش شوند.
سالنهای بسته صنعتی که رباتها باید بهصورت خودمختار نشتی را کشف و محل را به تیم ایمنی اطلاع دهند.
نکته درخشان این معماری آن است که ساده، سبک و ارزانقیمت است. بر خلاف سامانههای سنجش پیشرفته که نیازمند دوربینهای حرارتی یا گازکروماتوگرافی هستند، این سیستم با ابزارهایی مانند MQ sensors، وبکم معمولی، و پلتفرم رباتیکی ساده قابل راهاندازی است.
۴. الگوهای بومیسازی در صنعت ایران
در بسیاری از واحدهای صنعتی ایران، هنوز نظارت دقیق بر وضعیت نشت مواد شیمیایی وجود ندارد. این کمبود، هم بهدلیل هزینههای سنگین تجهیزات خارجی و هم بهعلت کمبود راهکارهای بومیسازپذیر است.
با توجه به ساختار این مقاله، میتوان یک مسیر اجرایی گامبهگام برای بومیسازی پیشنهاد کرد:
استفاده از رباتهای AGV ساخت شرکت پارازانژ
افزودن حسگر MQ و دوربین معمولی به همراه توسعه الگوریتم در محیط ROS
ساخت ماژول نرمافزاری رفتاری بر پایه Subsumption و اتصال به الگوریتم GWO از طریق نودهای مجزا
اجرای پایلوت در محیطهای ایزوله، مانند انبارهای بسته، خطوط بستهبندی یا کارگاههای شیمیایی
افزایش تدریجی تعداد حسگرها و دقت با توجه به بودجه و نیاز عملیاتی
این روند میتواند بهسادگی پایهای برای توسعه سامانههای تشخیص نشتی هوشمند و خودکار در صنعت داخلی ایران فراهم کند.
سیستمی که در این مقاله ارائه شده، از مرحله شبیهسازی تا پیادهسازی میدانی، نشان داده است که با ترکیب هوش ازدحامی، کنترل رفتاری و ادراک چندحسی میتوان در شرایط بسیار پیچیده و غیرقطعی، به عملکردی دقیق، ایمن و پایدار رسید. از طرفی، قابلیت اجرا با سختافزارهای اقتصادی و نرمافزارهای متنباز، این راهکار را به یک گزینه واقعی برای تحول دیجیتال ایمنی صنعتی در ایران تبدیل میکند.
جمعبندی نهایی و دعوت به همکاری: طراحی هوشمند برای ایمنی صنعتی آینده
در دنیای امروز، دیگر ایمنی صنعتی یک الزام قانونی صرف نیست؛ بلکه به بخشی از هویت برند، مزیت رقابتی و حتی استراتژی بازاریابی سازمانها تبدیل شده است. مجموعهای که بتواند با فناوریهای نوین، منابع انسانی و تجهیزات خود را از ریسکهای خطرناک – مانند نشت مواد شیمیایی – محافظت کند، در نگاه مشتریان و ذینفعان، یک سازمان آیندهنگر و قابلاعتماد خواهد بود.
مقالهای که در این بلاگ بررسی شد، نمونهای موفق از ترکیب فناوریهای ارزانقیمت، الگوریتمهای الهامگرفته از طبیعت، و معماریهای مدرن کنترلی برای حل یک چالش واقعی در محیطهای صنعتی است. در این مدل، یک ربات متحرک خودران با بهرهگیری از ترکیب بینایی ماشین و حسگرهای بویایی، در محیطهایی بدون جریان هوای مشخص و با پراکندگی بالای غلظت، توانسته است منبع نشت گاز را بهطور دقیق شناسایی و به آن واکنش نشان دهد. چیزی که تا پیش از این، یا بسیار پرهزینه بود یا تنها در شرایط کاملاً کنترلشده امکانپذیر بود.
الگوریتم استفادهشده، نه بهدنبال پیچیدگیهای غیرقابلاجراست، نه نیازمند زیرساخت خاصی. ساختار آن ماژولار، ساده، و قابل توسعه است. ما در این سیستم با سه اصل حیاتی روبهرو هستیم:
درک محیط بر پایه سنسور فیوژن بین بویایی و بینایی
تصمیمگیری رفتاری منعطف با اولویت ایمنی و سرعت واکنش
مدیریت هوشمند مسیر با الگوریتمی برگرفته از غریزهی شکار در طبیعت
از دیدگاه صنعتی، این مدل قابلیت تبدیلشدن به یک راهکار عملیاتی را دارد. بسیاری از کارخانهها و صنایع فرآیندی ایران، با زیرساختهایی مواجهاند که نمیتوانند از راهکارهای بسیار پیچیده یا هزینهبر استفاده کنند. اما همین معماری – در مقیاس کوچک، بهصورت ماژولار، و با ابزارهایی در دسترس – میتواند نقطهی آغاز تحول در حوزهای باشد که سالها از چشم دور مانده: ایمنی خودکار و تصمیمیار در مواجهه با نشتی گاز.
اگر شما:
مسئول ایمنی، نگهداری یا بهرهبرداری در یک مجموعهی صنعتی هستید،
مدیر تحول دیجیتال در یک کارخانه تولیدی، دارویی، پتروشیمی یا غذایی هستید،
یا علاقهمند به توسعه سامانههای هوشمند صنعتی با منابع محدود هستید،
ما در کنار شما هستیم تا:
این الگوریتم را با نیازها و محدودیتهای فنی شما بومیسازی کنیم،
از روی پلتفرمهای موجود نمونهی واقعی پیادهسازی کنیم،
و سیستم را بهصورت پایلوت، ارزیابی و در خطوط اصلی عملیاتی مستقر کنیم.
این همکاری میتواند آغازی باشد بر ورود نسل جدیدی از راهکارهای ایمنی بلادرنگ، هوشمند، و واکنشپذیر در صنایع ایران.
مشخصات مرجع مقاله
عنوان: A novel plume tracking method in partial 3D diffusive environments using multi-sensor fusion نویسندگان: Yugang Shan, Jie Yuan, Xiangyuan Shen ژورنال:Expert Systems With Applications دسترسی:https://doi.org/10.1016/j.eswa.2021.114993
.gif)














دیدگاهتان را بنویسید