.gif)








۱. لایه پایه: ناوبری محلی، کنترل حرکتی و اجتناب بلادرنگ با ROS
پایهگذار عملکرد فیزیکی هر ربات خودران، لایه کنترل حرکتی محلی است. در معماری MOLAR، این لایه بر بستر ROS پیادهسازی شده و مسئول پردازش مسیر، اجرای حرکت، و اجتناب از موانع است. اما برخلاف معماریهای کلاسیک که تنها بر روی SLAM و Localization تمرکز دارند، در MOLAR این لایه بهگونهای طراحی شده که بهصورت بلادرنگ، درک محیط، تصمیمگیری حرکتی، و رفتار تطبیقی را با هم ترکیب کند. المانهای کلیدی این لایه عبارتاند از:
-
ماژول ادراک محیطی (Perception Node): دریافت داده از LiDAR، دوربین RGB-D، IMU و تولید نقشه محلی با بهروزرسانی پیوسته موانع
-
ماژول اجتناب تطبیقی از مانع: تصمیمگیری لحظهای برای بازتنظیم مسیر در مواجهه با موانع متحرک یا غیرمنتظره
-
کنترلکننده سرعت و مسیر (Trajectory Controller): تولید فرمان حرکتی نرم، پایدار و بدون نوسان بر اساس وضعیت فعلی مسیر
-
رابط تعامل با لایه بالادست (Control API): امکان دریافت دستور توقف، تنظیم مسیر یا تغییر مأموریت از Task Manager در زمان اجرا
این لایه، ضامن ایمنی حرکتی و پایداری کنترل در محیطهایی با ترافیک انسانی بالا، فضای فشرده، و مسیرهای اشتراکی است. طراحی آن بهگونهای انجام شده که در صورت قطع ارتباط با لایههای بالاتر، همچنان بتواند رفتار ایمن حفظ کند و به حالت ایستای محافظتی (fail-safe) وارد شود.
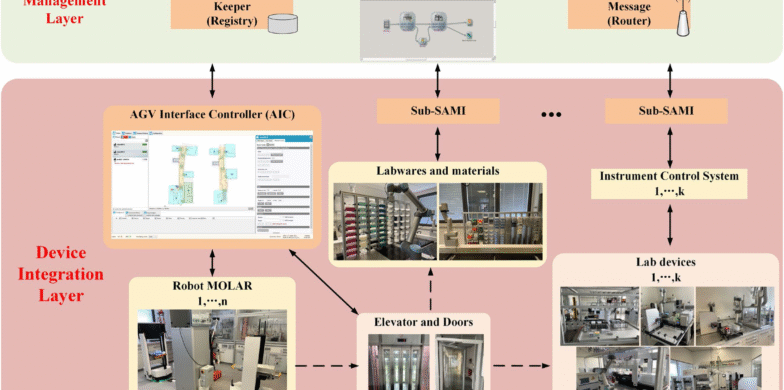
۲. لایه میانی: زیرساخت تعامل سیستماتیک با تجهیزات ساختمانی (SAMI)
یکی از نقاط ضعف معماریهای سنتی رباتهای موبایل، ناتوانی در ارتباط با تجهیزات غیررباتیکی است. در MOLAR، این مسئله بهصورت ساختاری حل شده است. لایه میانی معماری، با عنوان SAMI (Smart Actuator Management Interface)، مسئول مدیریت همه تعاملات با سامانههای ساختمانی و تجهیزات ثابت در محیط آزمایشگاه است. SAMI نهفقط یک ماژول رابط، بلکه یک لایه کاملاً مستقل با وظیفه هماهنگی، بازخوردگیری، و صدور فرمان به سیستمهایی مانند:
-
آسانسورهای هوشمند (با چند طبقه و دسترسی کنترلشده)
-
دربهای الکترونیکی با سیستم کارت، حسگر یا کلید API
-
انبارهای خودکار، قفسههای قفلدار، و تجهیزات ذخیرهسازی سرد
-
ایستگاههای پردازش خودکار یا نیمهاتوماتیک
مؤلفههای درونی SAMI شامل موارد زیر هستند:
-
ماژول پروتکل ارتباطی: پشتیبانی از REST، MQTT، Modbus و سایر پروتکلهای صنعتی برای تطبیق با تجهیزات مختلف
-
ماژول وضعیتیابی تجهیزات: مانیتورینگ بلادرنگ وضعیت باز/بسته بودن، خطا، یا انتظار هر تجهیز
-
سیستم زمانبندی تعامل: زمانبندی صدور فرمانها متناسب با زمانبندی وظیفه اصلی و شرایط لایه بالادست
-
واسط رخدادپذیر (Event-based API): انتقال رخدادها به Task Manager در صورت بروز خطا یا تأخیر در پاسخ
هدف این لایه، آن است که ربات بهعنوان بخشی از اکوسیستم زیرساختی ساختمان عمل کند، نه بهعنوان یک موجود مستقل. بدون SAMI، اجرای وظایف حیاتی مانند انتقال میان طبقات یا تحویل به فریزر اتوماتیک عملاً غیرممکن خواهد بود.
۳. لایه بالادست: مدیر تطبیقی وظایف با هماهنگی چندمنظوره (Task Manager)
در بالاترین سطح MOLAR، سیستم مدیریت مأموریتها (Adaptive Task Manager) قرار دارد که حکم «مغز تصمیمگیر» کل سامانه را دارد. این مؤلفه با تمرکز بر تحلیل بلادرنگ وضعیت ربات، تجهیزات، زمانبندی وظایف، و تعامل با سامانههای خارجی طراحی شده است.
وظایف کلیدی Task Manager عبارتاند از:
-
برنامهریزی پویا برای مأموریتهای لحظهای: تخصیص اولویت، تخمین زمان، انتخاب ربات مناسب و صدور مسیر
-
تعامل با سایر سامانههای سازمانی (مثل LIMS یا HIS): دریافت دستور جابجایی از سیستم اطلاعات بیمارستان یا آزمایشگاه
-
نظارت بلادرنگ بر اجرای وظایف: پایش سلامت مأموریت، گزارش وضعیت تجهیزات، و مدیریت استثنائات
-
بازتنظیم مسیر یا برنامه در صورت بروز اختلال: مانند تغییر مسیر به طبقه دیگر در صورت خرابی آسانسور یا ارسال نمونه به ایستگاه جایگزین
از نظر معماری، Task Manager شامل زیرماژولهای : Scheduler: برنامهریز چندوظیفهای تطبیقی، Allocator: تخصیصگر وظایف به رباتها بر اساس موقعیت و وضعیت باتری، Supervisor: ناظر اجرای هر گام از مأموریت، Exception Handler: مدیریت شکست، تأخیر یا عدم پاسخ زیرسیستمها هست. این لایه به سیستم اجازه میدهد که در مقیاس چندرباته و چندطبقه، وظایف خود را با پویایی بالا، ایمنی تضمینشده، و حداقل تأخیر اجرا کند.
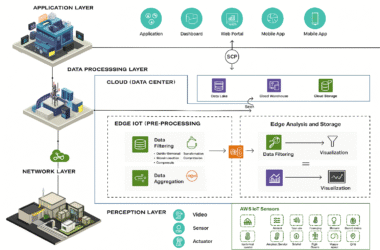
۴. ویژگیهای ساختاری: طراحی ماژولار، مقیاسپذیر و قابل تطبیق با پروژههای متنوع
معماری MOLAR برخلاف بسیاری از چارچوبهای خطی یا tightly-coupled، دارای یک ساختار کاملاً ماژولار و قابل پیکربندی است. این به آن معنای اینکه : هر لایه میتواند بهصورت مستقل توسعه داده شود یا در پروژه خاصی غیرفعال گردد، اجزای داخلی قابل تعویض با ماژولهای مشابه از برند دیگر هستند (مثلاً سامانه ناوبری جایگزین)، میتوان زیرسیستمهایی مانند SAMI را با نسخههای متناسب با پروتکلهای خاص آزمایشگاه تغییر داد و کل معماری از نظر توزیعپذیری، آمادهی اجرا در محیطهای چندعاملی، چندسطحی و حتی چندساختمانی است. همچنین، پیادهسازی لایهها با بهرهگیری از ROS، Docker، APIهای RESTful و ساختارهای سرویسگرا (SOA) باعث میشود:
-
در محیطهایی با تجهیزات ناهمگون (Multi-Vendor)، تطبیق بدون نیاز به بازطراحی انجام شود
-
در پروژههای آینده، توسعه از سطح مأموریت تا کنترل حرکتی با هزینه کم انجام شود
-
و استقرار سیستم روی سختافزارهای صنعتی (از Jetson تا کنترلرهای مرکزی سازمانی) ممکن باشد
در نهایت، MOLAR فراتر از یک چارچوب کنترلی ساده است؛ این معماری، تلفیقی از بینش مهندسی، ساختار کنترلی چندلایه، و تجربه عملیاتی در پیادهسازی رباتهای موبایل در شرایط پیچیده و انسانی–تعاملپذیر است.





دیدگاهتان را بنویسید